Technology Description
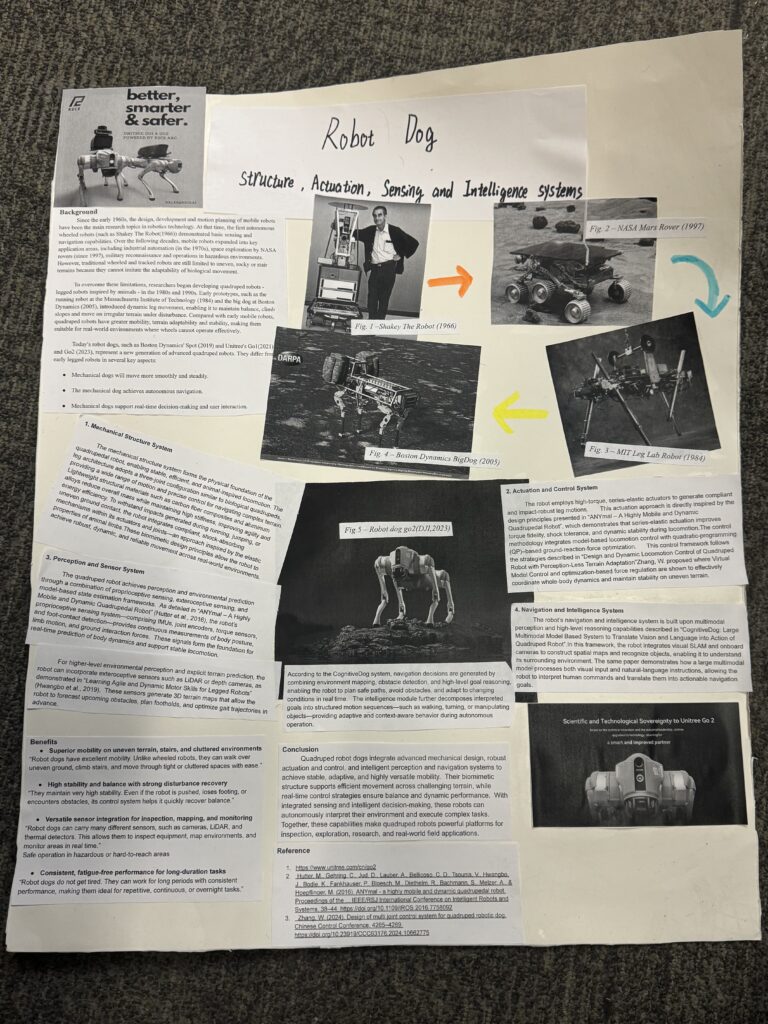
Robot dog
Structure, Actuation, Sensing, and Intelligence System
Background
Since the early 1960s, the design, development and motion planning of mobile robots have been the main research topics in robotics technology. At that time, the first autonomous wheeled robots (such as Shakey The Robot(1966)) demonstrated basic sensing and navigation capabilities. Over the following decades, mobile robots expanded into key application areas, including industrial automation (in the 1970s), space exploration by NASA rovers (since 1997), military reconnaissance and operations in hazardous environments. However, traditional wheeled and tracked robots are still limited to uneven, rocky or stair terrains because they cannot imitate the adaptability of biological movement.
To overcome these limitations, researchers began developing quadruped robots – legged robots inspired by animals – in the 1980s and 1990s. Early prototypes, such as the running robot at the Massachusetts Institute of Technology (1984) and the big dog at Boston Dynamics (2005), introduced dynamic leg movement, enabling it to maintain balance, climb slopes and move on irregular terrain under disturbance. Compared with early mobile robots, quadruped robots have greater mobility, terrain adaptability and stability, making them suitable for real-world environments where wheels cannot operate effectively.
Today’s robot dogs, such as Boston Dynamics’ Spot (2019) and Unitree’s Go1(2021) and Go2 (2023), represent a new generation of advanced quadruped robots. They differ from early legged robots in several key aspects:
Mechanical dogs will move more smoothly and steadily.
The mechanical dog achieves autonomous navigation.
Mechanical dogs support real-time decision-making and user interaction.
1. Mechanical Structure System
The mechanical structure system forms the physical foundation of the quadrupedal robot, enabling stable, efficient, and animal-inspired locomotion. The leg architecture adopts a three-joint configuration similar to biological quadrupeds, providing a wide range of motion and precise control for navigating complex terrain. Lightweight structural materials such as carbon fiber composites and aluminum alloys reduce overall mass while maintaining high stiffness, improving agility and energy efficiency. To withstand impacts generated during running, jumping, or uneven ground contact, the robot integrates compliant, shock-absorbing mechanisms within its actuators and joints—an approach inspired by the elastic properties of animal limbs.These biomimetic design principles allow the robot to achieve robust, dynamic, and reliable movement across real-world environments.
2. Actuation and Control System
The robot employs high-torque, series-elastic actuators to generate compliant and impact-robust leg motions. This actuation approach is directly inspired by the design principles presented in “ANYmal – A Highly Mobile and Dynamic Quadrupedal Robot”, which demonstrates that series-elastic actuation improves torque fidelity, shock tolerance, and dynamic stability during locomotion.The control methodology integrates model-based locomotion control with quadratic-programming (QP)–based ground-reaction-force optimization. This control framework follows the strategies described in “Design and Dynamic Locomotion Control of Quadruped Robot with Perception-Less Terrain Adaptation”Zhang, W. proposed where Virtual Model Control and optimization-based force regulation are shown to effectively coordinate whole-body dynamics and maintain stability on uneven terrain.
3. Perception and Sensor System
The quadruped robot achieves perception and environmental prediction through a combination of proprioceptive sensing, exteroceptive sensing, and model-based state estimation frameworks. As detailed in “ANYmal – A Highly Mobile and Dynamic Quadrupedal Robot” (Hutter et al., 2016), the robot’s proprioceptive sensing system—comprising IMUs, joint encoders, torque sensors, and foot-contact detection—provides continuous measurements of body posture, limb motion, and ground interaction forces. These signals form the foundation for real-time prediction of body dynamics and support stable locomotion.
For higher-level environmental perception and explicit terrain prediction, the robot can incorporate exteroceptive sensors such as LiDAR or depth cameras, as demonstrated in “Learning Agile and Dynamic Motor Skills for Legged Robots” (Hwangbo et al., 2019). These sensors generate 3D terrain maps that allow the robot to forecast upcoming obstacles, plan footholds, and optimize gait trajectories in advance.
4. Navigation and Intelligence System
The robot’s navigation and intelligence system is built upon multimodal perception and high-level reasoning capabilities described in “CognitiveDog: Large Multimodal Model Based System to Translate Vision and Language into Action of Quadruped Robot” . In this framework, the robot integrates visual SLAM and onboard cameras to construct spatial maps and recognize objects, enabling it to understand its surrounding environment. The same paper demonstrates how a large multimodal model processes both visual input and natural-language instructions, allowing the robot to interpret human commands and translate them into actionable navigation goals.
According to the CognitiveDog system, navigation decisions are generated by combining environment mapping, obstacle detection, and high-level goal reasoning, enabling the robot to plan safe paths, avoid obstacles, and adapt to changing conditions in real time. The intelligence module further decomposes interpreted goals into structured motion sequences—such as walking, turning, or manipulating objects—providing adaptive and context-aware behavior during autonomous operation.
Benefits
Superior mobility on uneven terrain, stairs, and cluttered environments
“Robot dogs have excellent mobility. Unlike wheeled robots, they can walk over uneven ground, climb stairs, and move through tight or cluttered spaces with ease.”
High stability and balance with strong disturbance recovery
“They maintain very high stability. Even if the robot is pushed, loses footing, or encounters obstacles, its control system helps it quickly recover balance.”
Versatile sensor integration for inspection, mapping, and monitoring
“Robot dogs can carry many different sensors, such as cameras, LiDAR, and thermal detectors. This allows them to inspect equipment, map environments, and monitor areas in real time.”
Safe operation in hazardous or hard-to-reach areas
Consistent, fatigue-free performance for long-duration tasks
“Robot dogs do not get tired. They can work for long periods with consistent performance, making them ideal for repetitive, continuous, or overnight tasks.”
Conclusion
Quadruped robot dogs integrate advanced mechanical design, robust actuation and control, and intelligent perception and navigation systems to achieve stable, adaptive, and highly versatile mobility. Their biomimetic structure supports efficient movement across challenging terrain, while real-time control strategies ensure balance and dynamic performance. With integrated sensing and intelligent decision-making, these robots can autonomously interpret their environment and execute complex tasks. Together, these capabilities make quadruped robots powerful platforms for inspection, exploration, research, and real-world field applications.
Reference
- https://www.unitree.com/cn/go2
- Hutter, M., Gehring, C., Jud, D., Lauber, A., Bellicoso, C. D., Tsounis, V., Hwangbo, J., Bodie, K., Fankhauser, P., Bloesch, M., Diethelm, R., Bachmann, S., Melzer, A., & Hoepflinger, M. (2016). ANYmal – a highly mobile and dynamic quadrupedal robot. Proceedings of the … IEEE/RSJ International Conference on Intelligent Robots and Systems, 38–44. https://doi.org/10.1109/IROS.2016.7758092
- Zhang, W. (2024). Design of multi joint control system for quadruped robotic dog. Chinese Control Conference, 4265–4269. https://doi.org/10.23919/CCC63176.2024.10662775

This entry is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International license.